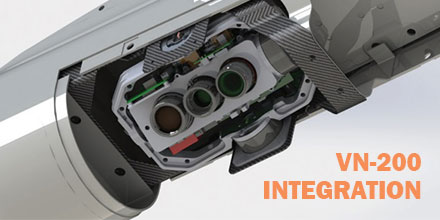
VectorNav announced that its VN-200 GPS-aided inertial navigation system (INS) was selected for integration into Overwatch Imaging‘s TK-series precision imaging payload.
The payload is for aerial smart mapping and automatic detection applications for UAVs (unmanned aerial vehicles) and manned aircraft.
Soda straw effect
Traditional tactical imagery payloads, such as stabilized turret systems, feature electro-optical cameras with small field-of-view angles and high zoom capabilities. Such systems are ideal for tracking target objects from high altitudes; however, they suffer from the “soda straw effect”.
When this system is zoomed in to see small targets, only a small area of ground is viewable. When the system is zoomed out to view large areas, smaller details are not visible to the user.
As such, stabilized “soda straw” video systems struggle when the application calls for finding small objects in very large areas. They are not an ideal match for industrial inspections or wide-area land management surveys.
Overwatch developed an imaging system with greater image resolution and area coverage for low-altitude manned and unmanned aircraft.
In addition, to deal with all the data, Overwatch developed automated image processing software to turn imagery into geospatial intelligence.
TK-series camera systems
Overwatch Imaging’s TK-series camera systems are designed around a unique, nadir-pointing pitch, roll and yaw stabilized mount.
The system features an imaging module that holds application specific sensors and optics. There's also an on-board mini-supercomputer and on-board storage for custom image processing algorithms.
To cover large areas with high resolution, engineers developed a step-stare scanning camera motion feature. Compared to traditional mapping systems, this feature increased the per-pass data by 4x. Users can map 4x the amount of ground per pass, increase the resolution by 4x or a combination of both.
To implement this advanced imaging technique Overwatch required an INS which could mount to the optical bench.
INS integration
Mounting the INS directly to the optical bench provided a few advantages.
The team no longer needed to rely on aircraft INS for data, it removed the requirement for encoders on the individual axes, and reduced the control system and electronics complexity. Additionally, it provided a smaller overall form factor (critical to small and medium-sized UAS).
It was also critical that the INS provide low latency attitude data within 0.1° accuracy for pitch and roll in dynamic conditions. This created a faster workflow, lessened the load on the onboard processor for real-time image stitching and allowed for operation at larger standoff ranges.
The engineers at Overwatch surveyed the market and down-selected several inertial products from a variety of suppliers. The focus was to identify a solution with the highest accuracy in the smallest form factor, for the best price.
The VectorNav VN-200 Rugged GPS-aided INS out competed all competitive products in each of these categories.
VN-200
The VN-200’s ability to output accurate position and attitude data at up to 400 Hz and high gyroscope angular rate range (±2000 °/s) allowed the TK-series to maintain accurate attitude estimates while performing the step-stare scanning motions.
“VectorNav has an excellent reputation in the marketplace,” said Greg Davis, Founder of Overwatch Imaging. “When a review showed that the VN-200 surpassed other INS solutions in size, cost and performance our choice was clear.”
The VN-200 plays a vital role in the TK-series payloads. It provides valuable data for platform stabilization, roll sweeping, step-stare functionality and accurate geolocation of target objects, setting the TK-series apart from its competition.
In October 2016 Textron Systems announced the integration of Overwatch Imaging’s TK-7 Firewatch featuring the VN-200 into the Aerosonde Small UAS.
The TK-7 Firewatch features multi-megapixel color focal plane array and co-boresighted infrared sensors that enable the system to automatically detect anomalies, such as hot-spots for wildfire mapping. This enables wildland fire crews and forest health managers to more effectively monitor large areas, providing critical analysis, reporting and rapid response capability.
Overwatch Imaging’s TK-series is in use in a multitude of new applications -- from vegetation management and infrastructure inspection to target auto-detection and geolocation.

 uity Chutes, the leading manufacturer of drone parachute recovery systems, adds to their line with the Matrice 200 and Matrice 210 Automatic Emergency Drone Parachute.
Designed entirely with the end-user in mind, it is lightweight, easy to use and reliable.
Users can pack and load the parachute, eliminating the need to send it back to the manufacturer after each use. Designed for several uses, it comes with a parachute rigger jig to make folding and packing easy.
To launch the parachute the bundle provides the Harrier parachute launcher. The Harrier features a high energy compression spring that quickly ejects the parachute out and away from the Matrice 200/210. The launcher has no regulatory or transportation limitations.
uity Chutes, the leading manufacturer of drone parachute recovery systems, adds to their line with the Matrice 200 and Matrice 210 Automatic Emergency Drone Parachute.
Designed entirely with the end-user in mind, it is lightweight, easy to use and reliable.
Users can pack and load the parachute, eliminating the need to send it back to the manufacturer after each use. Designed for several uses, it comes with a parachute rigger jig to make folding and packing easy.
To launch the parachute the bundle provides the Harrier parachute launcher. The Harrier features a high energy compression spring that quickly ejects the parachute out and away from the Matrice 200/210. The launcher has no regulatory or transportation limitations.
 Transitioning UAVs, which combine fixed-wing aircraft with a multi-rotor, seem to be a favored development craft these days.
Transitioning UAVs, which combine fixed-wing aircraft with a multi-rotor, seem to be a favored development craft these days. From their military origins a few decades ago -- carrying sophisticated systems and running remote, cross-boarder missions -- drones are now commercial and industrial platforms.
Today, drones play a significant role in the next generation of automated and autonomous vehicles. The vision of multiple drones filling in the public sky, running various missions smoothly is slowly becoming a reality.
From their military origins a few decades ago -- carrying sophisticated systems and running remote, cross-boarder missions -- drones are now commercial and industrial platforms.
Today, drones play a significant role in the next generation of automated and autonomous vehicles. The vision of multiple drones filling in the public sky, running various missions smoothly is slowly becoming a reality.
 KDE Direct recently announced new features for their UAS (unmanned aerial system) UVC electronic speed controller (ESC) series and KDE Device Manager V1.32 software. Upgrades include data logging and graphing, stall protection, and motor control optimizations.
The new data graphing and logging features are accessible by updating the UVC Series ESC to the latest firmware. During a flight, the UVC Series ESC records the following:
KDE Direct recently announced new features for their UAS (unmanned aerial system) UVC electronic speed controller (ESC) series and KDE Device Manager V1.32 software. Upgrades include data logging and graphing, stall protection, and motor control optimizations.
The new data graphing and logging features are accessible by updating the UVC Series ESC to the latest firmware. During a flight, the UVC Series ESC records the following:
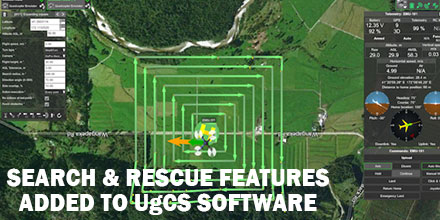 UgCS, provider of mission planning software for unmanned aircraft systems (UAS), together with public safety and disaster response UAS experts Airborne Response, developed a comprehensive search capability for drones.
The new feature allows remote pilots to more effectively conduct search and rescue operations using the UgCS platform.
UgCS, provider of mission planning software for unmanned aircraft systems (UAS), together with public safety and disaster response UAS experts Airborne Response, developed a comprehensive search capability for drones.
The new feature allows remote pilots to more effectively conduct search and rescue operations using the UgCS platform.
