
A record was recently set in long-distance delivery via drone. The record-breaking event took place
May 5, 2017 and involved several key stakeholders.
The Nevada UAS Consortium, dubbed Team Roadrunner, flew a fixed-wing Unmanned Aerial Vehicle (UAV) over 97 miles to
Austin, Texas through use of cellular connectivity.
Delivery via Drone
Launched from an urban location in central
Texas, the UAV flew a pre-planned route through National Airspace System (NAS). Team Roadrunner used mobile command and control, a visual observer team, and stationary visual observers equipped with enhanced radios and cell phone communications which allowed the UAV to fly using a cellular communications link.
The UAV successfully landed in Austin, Texas and delivered its package.
Team Roadrunner
consisted of the FAA-designated Nevada UAS Test Site, Volans-i UAS, Latitude UAS, AUV Flight Services. The team also included ground and mobile visual observer support from
Embry-Riddle Aeronautical University (ERAU) Worldwide campuses.
“This was the most challenging, logistically-intensive, and longest package delivery demonstration recorded to date using cellular technology in the NAS. It allowed us the opportunity to demonstrate innovative capability – a demonstration necessity for the UAS industry,” said Dr.
Chris Walach, Director of the FAA-designated Nevada UAS Test Site and Adjunct Assistant Professor,
College of Aeronautics at
Embry-Riddle Aeronautical University Worldwide. “Assembling a resilient team, being at the right place at the right time with the right technology and entrepreneurial perspective helped us accomplish this mission.”
Walach continued, “Drone package delivery in an urban and remote environment is the wave of the future. N
evada is leading and helping grow this major commercial endeavor. These milestones prove that technology enables the safe integration of UAS into the NAS for long-distance and urban package deliveries.”
Nevada previously conducted historic package delivery BLOS demonstrations in
Hawthorne, Nevada at over 39 miles as well as the first publicly-recorded package delivery to a
Reno, Nevada homeowner.
Safety precautions along the route
The operation included layers of safety. Along the flight path, the team stationed visual observers as well as a mobile team to cover remote areas.
“It is very exciting to be part of something truly ground breaking. Integration of students and alumni on similar projects with
NIAS in the future extends our outreach to the industry,” said Dr.
Scott Burgess, Associate Professor,
College of Aeronautics at
Embry-Riddle Aeronautical University Worldwide.
“Aviation has evolved much since the days of the Wright Brothers. I truly believe that unmanned systems are going to revolutionize the aviation industry and beyond. I am proud that
Embry-Riddle faculty, students, and fellow Alumni are actively playing a part in this incredible journey,” said
Kandi Windham, Campus Director,
Embry-Riddle Aeronautical University Worldwide,
Houston, Texas.
“This mission was extremely complicated. Ensuring that the UAS met all the performance characteristics was only one piece. We placed great emphasis on flight safety, airworthiness, communication, command and control, air and ground coordination, and VO logistics. The Volans-i,
Latitude, AUV Flight Services, and the
NIAS team worked extremely well together. Given the complexity and the ultimate success of the mission, it is clear to me that we couldn’t have picked a better team,” said
Hannan Parvizian, Volans-i Founder.
Future of drone delivery
“Creating a safe and thriving drone industry is an incredible challenge, especially when coupled with drone package delivery. The loss of communications during a long flight is a real concern. This mission showed cellular technology can ensure communication with a drone is not lost over a long-distance delivery. The record-breaking success of Team Roadrunner’s aerial package delivery mission proves that diligent testing in complex conditions will lead to drone delivery becoming reality,” said
Steve Hill, Executive Director of the
Nevada Governor’s Office of Economic Development.
The Nevada UAS Test Site is one of seven Federal Aviation Administration-designated UAS Test Sites. The Nevada UAS Test Site in consultation with the Lone Star UAS Test Site helped plan the mission.

 ARGO’s Space, Robotics and Defense Division recently announced the release of the ARGO J8 Atlas XTR (Xtreme Terrain Robot).
This UGV (Unmanned Ground Vehicle) is designed for defense, disaster relief missions and rescue operations.
Today, UGVs are playing an increasingly important role in hazardous and extreme environment operations.
ARGO developed the electric 8-wheeled amphibious, all-terrain mobile robot to help protect the lives of soldiers and keep humans out of harm’s way.
ARGO’s Space, Robotics and Defense Division recently announced the release of the ARGO J8 Atlas XTR (Xtreme Terrain Robot).
This UGV (Unmanned Ground Vehicle) is designed for defense, disaster relief missions and rescue operations.
Today, UGVs are playing an increasingly important role in hazardous and extreme environment operations.
ARGO developed the electric 8-wheeled amphibious, all-terrain mobile robot to help protect the lives of soldiers and keep humans out of harm’s way.
 Affordable, high-end drones coupled with easy-to-use mission-planning tools, created the perfect environment for drones to flourish.
No longer the preserve of specialists, applications using drones have ventured into survey, inspection and volume analysis.
The impact of drones is little short of revolutionary.
But, in the air, the stakes are higher. When things go wrong, the consequences are invariably much more serious than for a ground-based application. One of the biggest threats to drone safety is GNSS interference.
At the very least, disruptions to satellite signals can degrade position quality. When this occurs it causes fall-backs from high-precision RTK and PPP modes to less-precise modes. In the most extreme cases, interference can result in complete loss of signal tracking and positioning.
Affordable, high-end drones coupled with easy-to-use mission-planning tools, created the perfect environment for drones to flourish.
No longer the preserve of specialists, applications using drones have ventured into survey, inspection and volume analysis.
The impact of drones is little short of revolutionary.
But, in the air, the stakes are higher. When things go wrong, the consequences are invariably much more serious than for a ground-based application. One of the biggest threats to drone safety is GNSS interference.
At the very least, disruptions to satellite signals can degrade position quality. When this occurs it causes fall-backs from high-precision RTK and PPP modes to less-precise modes. In the most extreme cases, interference can result in complete loss of signal tracking and positioning.
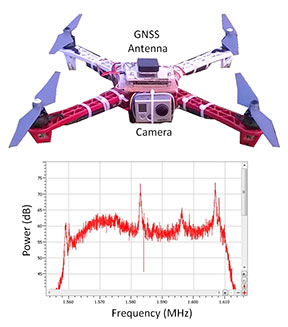 Figure 1 shows what happened to the GPS L1-band spectrum when a GoPro camera was installed on a quadcopter close to the GNSS antenna without sufficient shielding. The three peaks are exactly 24 MHz apart. This points to their being harmonics of a 24 MHz signal: the typical frequency for a MMC/SD logging interface.
An AsteRx4 receiver, which includes the AIM+ system, was selected for this setup. As well as mitigating the effects of interference, AIM+ includes a spectrum plot to view the RF input from the antenna in both time and frequency domains.
At the installation stage, the ability to view the RF spectrum is an invaluable tool for identifying the source of interference. Plus, it helps with determining the effectiveness of measures such as modifying the setup or adding shielding.
For the quadcopter installation in this example, the loss of RTK was readily diagnosed. The problem was solved by placing the camera in a shielded case. All this while the quadcopter was still in the workshop.
Figure 1 shows what happened to the GPS L1-band spectrum when a GoPro camera was installed on a quadcopter close to the GNSS antenna without sufficient shielding. The three peaks are exactly 24 MHz apart. This points to their being harmonics of a 24 MHz signal: the typical frequency for a MMC/SD logging interface.
An AsteRx4 receiver, which includes the AIM+ system, was selected for this setup. As well as mitigating the effects of interference, AIM+ includes a spectrum plot to view the RF input from the antenna in both time and frequency domains.
At the installation stage, the ability to view the RF spectrum is an invaluable tool for identifying the source of interference. Plus, it helps with determining the effectiveness of measures such as modifying the setup or adding shielding.
For the quadcopter installation in this example, the loss of RTK was readily diagnosed. The problem was solved by placing the camera in a shielded case. All this while the quadcopter was still in the workshop.
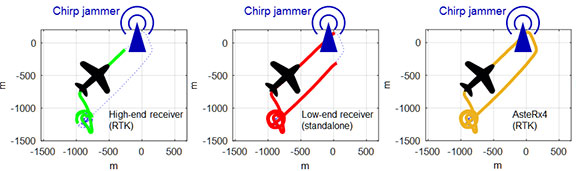 Figure 2 shows how a 10mW chirp jammer can knock out RTK positioning over more than 1 km in a high-end receiver.
Even a low-end consumer-grade L1 receiver, being less accurate and thus less sensitive, loses stand-alone positioning over several hundred meters.
With AIM+ activated, the AsteRx4 is able to maintain an RTK fix throughout the simulated flight. It also shows no degradation to its position variance.
Figure 2 shows how a 10mW chirp jammer can knock out RTK positioning over more than 1 km in a high-end receiver.
Even a low-end consumer-grade L1 receiver, being less accurate and thus less sensitive, loses stand-alone positioning over several hundred meters.
With AIM+ activated, the AsteRx4 is able to maintain an RTK fix throughout the simulated flight. It also shows no degradation to its position variance.
 UAS vendors targeting markets from commercial survey to agriculture are fielding systems with real-time kinematic GNSS (RTK) capability.
In principle, RTK promises accuracies at the 1-3cm level. The main purpose is to minimize or eliminate the need for ground control points, thereby reducing cost.
Altavian uses GNSS receivers upgradeable to RTK operation, but favors another approach for this level of accuracy: post-processed kinematic (PPK). There are a couple of reasons why:
UAS vendors targeting markets from commercial survey to agriculture are fielding systems with real-time kinematic GNSS (RTK) capability.
In principle, RTK promises accuracies at the 1-3cm level. The main purpose is to minimize or eliminate the need for ground control points, thereby reducing cost.
Altavian uses GNSS receivers upgradeable to RTK operation, but favors another approach for this level of accuracy: post-processed kinematic (PPK). There are a couple of reasons why:
 Hemisphere GNSS recently announced the
Hemisphere GNSS recently announced the  New and emerging technologies tend to enhance existing industries and services. In addition, emerging technologies also help create new industries and services.
Unmanned aerial vehicles are one of the biggest trends due in part to their potential use across a range of service and industry applications.
One such emerging application is coastline monitoring.
New and emerging technologies tend to enhance existing industries and services. In addition, emerging technologies also help create new industries and services.
Unmanned aerial vehicles are one of the biggest trends due in part to their potential use across a range of service and industry applications.
One such emerging application is coastline monitoring.
